A newly funded intelligent robotic system for tunnel inspection is slated for testing on several large European jobs as early as next December—well before a working prototype is built. Funders’ confidence is based on a successful manual prototype developed by the same researchers.
ROBINSPECT (Robotic System with Intelligent Vision and Control for Tunnel Structural Inspection and Evaluation), is a robot developed by a European consortium of schools, led by Madrid’s Universidad Carlos III (UC3M) and funded by $6.8 million in research money, partly by a European Union Seventh Framework Programme (FP7) grant.
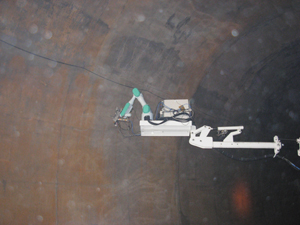
ROBINSPECT is based upon previous research called TunConstruct, in which a scanning device with millimeter-level accuracy was harnessed to a truck-mounted crane used to manually scan concrete tunnel walls for cracks, fissures and spaces between joints while the truck drives through.
“The purpose of this project is to fully automate the process,” says Juan G. Víctores researcher at UC3M, who worked with civil engineers to push the previous project forward and is helping to lead ROBINSPECT. He says an Italian hardware manufacturer called CNR is developing a highly-accurate scanning technology based on ultrasound that will be one of the sensors used by ROBINSPECT. Another is similar to Microsoft's Kinect but more accurate.
"TunConstruct was a proof-of-concept, but we knew we would have to move on to a more automated approach," he says. When a car is moving it has 2 degrees of freedom (DoF), the the crane arm has 3 to 4 DoF, and the robot has another 7 DoF, he says. It was impossible to control while driving, and the truck had to make stops to take readings. The ROBINSPECT intelligent control system, with a subset of intelligent control techniques called Bayesian algorithms, will be able manage the subsystems coherently, he says. Accuracy of movement is importatnt for the longevity of the hardware, he adds.
“One hurdle is the interiors of tunnels are hard on computers and robotics,” says Victores. One of the sensors must be very close to the tunnel walls to register scans, and he says protecting it is difficult. The continuously updating Bayesian theory algorithms will help get minute controls to the necessary level.
Vicotres adds that the motive for the research came from civil engineers looking to speed the time of tunnel inspection and thus road downtime.
A prototype of this high-tech robotic crane will be ready for preliminary testing at the end of 2014 and is scheduled for final delivery in mid 2016. The researchers say tests are scheduled for late 2014 in three locations: the London underground, three subterranean sections of Greece’s Egnatia highway and some experimental tunnels of the VSH in Switzerland.




Post a comment to this article
Report Abusive Comment