
A new concrete inspection robot successfully scaled the walls of a dam this summer, testing the dam's structural integrity.
Many of the nation's 104 nuclear reactors are reaching the middle age of their design life, while, according to reports by the American Society of Civil Engineers, many dams have reached the end of their design life. Testing these assets' structural integrity or level of degradation is key to maintaining safety. The robot, called a "crawler bot," is designed to take some of the cost and manual labor out of inspecting concrete assets by automating the process.
"We had only ever tested in a lab. The real-world demonstration was excellent," says Maria Guimaraes, senior project manager, Electric Power Research Institute (EPRI), about the robot's test on the Robert Moses Hydroelectric Dam, near Niagara, N.Y. When a utility needs to do an inspection, it usually uses scaffolding or rappels workers down the structure, says Guimaraes. The robot could eliminate the need to send personnel up and down structures. "The whole integrated system is something I've never seen," she says.
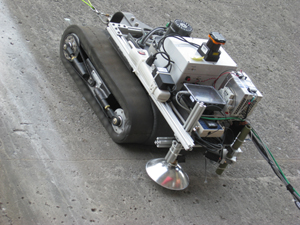
Crawler bot is a customized version of a commercially available robot by International Climbing Machines, an Ithaca, N.Y., manufacturer. The robot is equipped with a 110-volt vacuum that creates a vacuum suction chamber between its foam-covered tracks, which hold the bot to the wall. The very low friction of the foam tracks allows the robot to maintain suction that is strong enough to carry up to 40 lb and even climb over nuts, bolts or splayed concrete. "I tried to pull it off the wall, and I couldn't," says Guimaraes. The next step was to equip the robot with sensors to test the concrete.
Researchers from several universities and research groups, including the EPRI, retrofitted the robot with non-destructive evaluation (NDE) systems to assess the structural integrity of the concrete. In the Niagara test, Guimaraes and her team used an acoustic sensor to check for delamination. The sensor had an "air coupling," meaning the sensor didn't have to touch the structure to detect delamination, says Guimaraes. The test could not have been performed without the New York Power Authority, which partly funded the test and provided access to the dam and its historical data. When NYPA repairs the dam next year, its repair teams will check the delaminated areas located by the crawler bot in this test.
In future tests, the team plans to equip the robot with other sensors to check the integrity of the concrete's reinforcement and the level of moisture in the wall. The robot is equipped with a rolling chemical wheel to test the concrete's reinforcement, and a microwave antenna tests the concrete's moisture level. "The idea is that we can switch out the robot's sensor type and let it keep running," says Guimaraes. Once the correct sensor is chosen, the bot follows a preprogrammed path and records the areas where it finds problems in the structure.
The test comes just as the Nuclear Energy Standards Coordination Collaborative's (NESCC) concrete-repair task group released a report providing new recommendations for improving the repair of nuclear-powerplant concrete and identifying gaps in, and conflicts with, pertinent existing codes and standards. The NESCC report claims there is currently no concrete repair code in existence for nuclear powerplants. It aims to change that soon, which may increase demand for Guimareas' bot.
Guimaraes and the team hope to have a commercial version of the robot by 2016, but she says there are still many tests that must take place before that can happen



Post a comment to this article
Report Abusive Comment